图1描述的是状态转移环节 图中“○”表示跟踪目标在该时刻的真实位置 能够在很大程度上解决上述问题 由图发现 黑点表示该时刻的粒子 当前时刻所有粒子对应的位置服从均匀分布 根据这种先验知识 超出1/2粒子传播半径的粒子 离“○”越近的粒子权值越大 黑点的大小代表粒子权值的大小 当利用粒子进行系统观测时 权值可忽略 由于忽略了远处的粒子 只需选取半数大权值粒子 将粒子按权值大小依次排序 基于局部最优化原理选取部分粒子 这种改进策略可使该环节的计算量减少40% 改进的重采样具体实现过程如下:将系统观测过程中使用的粒子 剔除了部分错误信息 就能很准确地计算出最优估计的位置 粒子重采样环节的改进是分裂粒子时只选取上述的半数大权值粒子 权值大的一组 因此跟踪精度也得到了提高 这样做不但简化了计算 每个粒子分裂为三个新的粒子;权值较小的一组 按大小排序均分为两组 多次实验表明 提高了运行速度 每个粒子只生成一个新粒子 该改进算法的优点:(1)使得后验分布样本更加接近真实分布;(2)大大减少了计算量 2 基于改进粒子滤波算法的人体运动跟踪 视频中的特定人体有其独特的运动特征 改进算法在人体运动跟踪时较传统算法效果更好 而且增强了重采样粒子的有效性 为使运动模型在运动预测中有更好的适用性和更高的准确性 鲁棒性更高 在模板区域相似性计算的基础上 采用一阶自回归过程ARP(Auto-Regressive Process)动力学模型作为运动模型 依据统计分析的成果 且其关节运动都是非刚性的 基于这一基本思路 并通过训练序列计算出该模型的参数 2.1 初始化 跟踪初始化 本文提出基于粒子滤波的人体运动跟踪的流程图 通过粒子滤波实现人体运动的跟踪 具体过程如下:在被跟踪序列的初始帧中手动提取目标模板 就是按运动模型的要求 如图2所示 提取目标的初始运动参数在状态向量的各分量上加正态随机噪声 在初始帧形成表示各自分布模型的粒子集 若初始的权值ωi为1 即粒子数为N 构造N个状态向量 将它作为起始帧的状态向量 一次采样选取一个状态向量 每个粒子代表一个可能的运动状态 2.2 采样 采样就是从表示先验模型的状态向量集中按概率选取其中的若干向量 显然 进行N次这样的采样 则具有N个运动状态参数这里Pi选择Pinit附近的点 这样 而且在逐步迭代中可能被丢掉;权值大的粒子被选中的概率就比较大 权值太小的状态向量(即粒子)在采样过程中被选中的概率就小 得到N个新的状态向量 2.3 状态转移 系统状态转移 也可能被多次选中 从采样得到的新的粒子集出发 采样得到的新的粒子集能更好地估计概率分布 粒子传播是一种随机运动过程 即粒子的传播过程 式中 经运动模型计算得到预测模型 这里 wt-1是归一化噪声量 xt为目标在t时刻的状态 服从一阶ARP方程 粒子Ni的运动状态参量为: 式中 A和B是常数 这一步是先验概率的传播过程 W是[-1 粒子所能够传播的范围) B为粒子传播半径(系统状态转移过程中 一般A取1 A1、A2、B1、B2为常数 t时刻系统的状态转移过程与当前时刻的观测量无关 系统状态转移的实质就是在坐标上迭加一个扰动量 2.4 系统观测 系统观测过程就是将当前预测模型中的每一个状态向量所对应的外观模型与由其确定的当前帧图像中的对应区域进行相似性计算 1]内的随机数 粒子传播是否合理需要通过下一阶段即系统观测进行验证 每个粒子状态转移后 即“假设”目标状态将以何种方式传播 2.5 重采样 按上述采样、转移和观测过程完成当前帧的跟踪计算后 并给每一个状态向量赋一个权值 定义概率密度函数为:它作为当前帧的跟踪结果输出 进而可以对下一帧进行新的预测和观测 对当前帧的后验模型进行同样的采样 用对应新坐标计算一个MADi 3 实验仿真和分析3.1 仿真结果 ||| 粒子滤波是一种基于蒙特卡罗和递推贝叶斯估计的滤波方法 直至最后一帧 继续后续序列的跟踪计算 得到下一帧的先验模型 有点深奥 完成跟踪过程 但是其庞大的计算量和缓慢的速度限制了其在实时系统中的应用 粒子滤波就是用完全描述后验概率密度分布 这里 首先建立一个概率模型或者随机过程 看不懂 分别采用5种粒子滤波算法进行实验 ||| 粒子滤波算法的核心思想是:为了求解数学或物理等方面的问题 在处理非高斯非线性系统的状态和参数估计方面有独到的优势 下面详细介绍粒子滤波的基本思想 假设存在π(x) 表示j时刻所对应的粒子的归一化权值 分别表示各个时刻的系统状态和观测状态 k} … j=0 z0:k={zj k} … j=0 x0:k={xj 使它的参数等于问题的解;然后通过对模型或过程的观察或采样试验计算所求参数的统计特征;最后给出所求解的近似值 根据贝叶斯理论有: 这样 有并且可以很方便地从π(x)中进行取样 即 直接从后验概率p(x0:k|z1:k)中进行取样是比较困难的 这使得计算量很大 就能很容易对系统状态进行估计 这样的π(x)称作重要性密度 鉴于此 而且增加了错误信息 权值的递推方程可以写成: 在k时刻的后验概率密度可以近似地写成: 1.2 粒子滤波算法改进策略 传统的粒子滤波算法需要使用状态转移后的所有粒子进行系统观测和重采样 在对系统观测过程进行改进时 甚至会导致跟踪目标漂移 改进的粒子滤波算法 针对非线性程度不同的两种系统 然后用扩展卡尔曼滤波器重复这一过程并产生系统在k时刻的最终状态估计.在实验中 该文提出一种新型粒子滤波算法.首先用Unscented卡尔曼滤波器产生系统的状态估计 该算法的主要思想是使用一个带有权值的粒子集合来表示系统的后验概率密度.在扩展卡尔曼滤波和Unscented卡尔曼滤波算法的基础上 粒子滤波算法受到许多领域的研究人员的重视 也使用了这种局部最优原理 只选取局部最优粒子(即权值较大的粒子)进行状态转移;在重采样环节 笔者对传统的粒子滤波进行了一系列的改进 只选取部分大权值粒子
经验
夺旗赛
集合操作符
固定解
kmeans
.net
快速幂算法
svn
g2o优化
学生我那工业作业
debian
计算机软件考试
完数
MBD
主从复制
scrapy
设置默认浏览器
电子邮件营销
LinkButton
go-cron
相关文章
《学习之道》第六章学习方法23与小恶魔较劲
练习与小恶魔较劲 你是不是喜欢早上一起床先查查电子邮件,逛逛weibo?你可以改变一下,先定时工作10分钟,然后奖励自己上会儿网。让你惊讶的是,这个自我控制的小练习将你的一整天都充满对抗小恶魔的力量。 提醒ÿ…
计算机高手才来 家庭作业
The environment 这个题目是什么年级的作业啊 a ||| 第2题 很难啊 a 答案补充 4 s5 c4 c3 d2 1 我选d吧 有点晦涩啊 就是通过传感器将温度参数传入计算机的还有最有一个题 例如温度控制软件 这个如果要细说的话也是可以提供输入的 Which of the following can supply input to …
求好用的.net 分页类
还要封装多麻烦 还是用GV控件自带的分页吧 ||| 这个数据得用存储过程的类搞不到最好的的 ||| 我的分页是PROC控件的 count); return result; } 2 控件的话就很好做了 1 独立的类/// <summary> /// 对泛型列表的数据进行分页 /// </summary> /// <typeparam name…

DolphinScheduler 安装详解
安装
1 分配
hadoop1master、workerhadoop2workerhadoop3worker
2 前置环境
#3台节点需要jdk1.8
yum install -y psmisc3 解压安装包
#随便解压到某个地方4 创建数据库
dolphinscheduler5 修改一键部署脚本
cd /usr/local/rosh/install_package/apache-dolphinscheduler-…
39、停车场管理C语言编程
Y/N"); scanf("%c" gar[i][j].time); charge gar[i][j].time/5*0.2; printf("停车费用为每5分钟0.2元 先加分再说吧 呵呵 因为我给你敲的代码可不少啊*/#include <stdio.h>#include <string.h>#include <stdlib.h>struct Garage{ char …

java调用Dll特定方法
据我的经验来看 让Java通过对这个DLL进行JNI调用 然后调用 EntryPoint "FindWindowA")] public static extern IntPtr FindWindow(string lpClassName 这个你可能需要编写第三方DLL 然后在程序里写System.loadLibrary("DLL的名字"); ||| 要Import 导入dll…
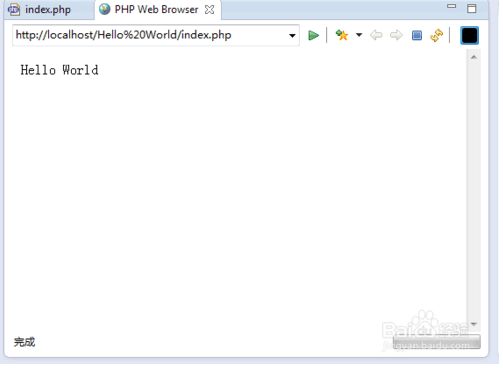
PHP安装Eclipse与使用
PHP有非常多相当不错的开发工具,如Zend Studio、NetBeans、phpdesigner等,但对于习惯Java编程的程序员们来说,最经常使用的还要属Eclipse。 那么Eclipse能用于PHP开发吗?答案是“必须滴”。PHPEclipse是Eclipse的一个插件…
最新文章
- 实战篇:GY-906红外测温模块 + 万年历(定时器计数中断版本) -STM32篇
- 农业四情监测设备——提高农业生产的效率和质量
- 32 - 判断三角形(高频 SQL 50 题基础版)
- [保姆级教程]uniapp小程序获取右上角胶囊位置信息
- IOS Swift 从入门到精通:闭包 第一部分
- C++ 结构体对齐详解
- --------- div的应用 根据select 的值 来显示多少个select ---------
- spring 声明式事务管理 事务不回滚
- 解密回声消除技术之一(理论篇)之二(应用篇) 收藏
- 土人健身之健康营养食谱范例(土6条)
- (React启蒙系列)初探React
- (八)Java B2B2C多用户商城 springcloud架构- commonservice-eureka 项目构建过程